
Asenkron motorlar üç fazlı akım ile çalışan motorların en önemli olanlarıdır. Bir asenkron motorun statoru senkron motorların statoruna çok benzer. Asenkron motorlar kendi aralarında farklı türlere ayrılır. Bu farklar rotorların çeşitli yapılarda olmasından ileri gelmektedir. Bugün bilezikli asenkron motordan bahsedeceğiz. Ayrıca bilezikli asenkron motorun diğer adı rotoru sargılı asenkron motor diye de anılmaktadır. Bunun yanında asenkron motorlara genel olarak indüksiyon motorları da denildiğini söylemiş olalım.
Bilezikli Asenkron Motor Yapısı
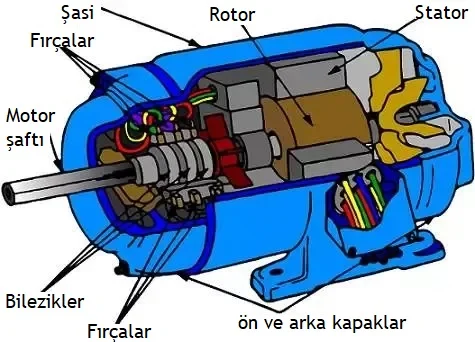
Bu motorun statoru: gövde, stator sac paketleri ve stator sargılarından oluşmuş olup, rotoru stator içinde yataklanmıştır. (Şekil – 1). Rotor mili üzerinde rotor saç paketi ve döner bilezikler bulunur. Rotor saç paketi üzerine açılmış oluklara rotor sargıları döşenmiştir. Hemen hemen bütün rotorlarda üç sargı (üç faz sargısı) bulunmaktadır. Bu sargılar genellikle yıldız; ender olarak üçgen bağlanırlar. Bazı durumlarda rotorlarda, çift sargıya da (çift faz sargısı) rastlanmaktadır. Bu tür sargılar motor içinde V devresi şeklinde bağlanırlar. İster çift, ister üç sargılı olsun sargı uçları rotor üzerinde bulunan döner bileziklere bağlanır. Döner bileziklerle, akım devresi arasındaki bağlantı kömür fırçalar yardımıyla sağlanır. Uç sargılı motorların sargı uçları döner bilezikler üzerinden motor kutusundaki (u), (v) ve (w) terminallerine bağlantı halindedir.
Bilezikli Asenkron Motor Çalışma Prensibi
Bir deney motorunun döner bilezikleri arasına (örneğin (u) ve (v) terminalleri) bir voltmetre bağlanıp, statordan üç fazlı akım geçirildiğinde, rotorun dönmediği, ancak voltmetrenin bir gerilim değeri gösterdiği izlenecektir.
Motor dönmez durumda iken stator ve rotor sargıları bir transformatör gibi çalışır. Statorda oluşan döner alan rotor sargıları üzerinde bir gerilim endükler. Rotor dönmez durumda iken üzerinde endüklenen bu gerilim Rotor sükûnet gerilimi olarak anılır. Rotor sükûnet gerilimi motor etiketi üzerinde stator gerilimi yanı sıra belirtilir.
Aynı deney motorunun bu kez (u) ve (v) terminalleri arasına bir ampermetre bağlanmış ve üçüncü terminali (w) örneğin (u) terminaline köprülenmiştir. Statordan üç fazlı akım geçirildiğinde, ampermetrenin saptığı ve rotorun döndüğü görülecektir.
Rotorda endüklenen gerilim rotor sargı terminallerinin birbiriyle bağlanması sonucu bir akım ortaya çıkarmaktadır. Statorun döner alanı ile rotor üstünde ortaya çıkan bu akım bir döndürme momenti oluşturmakta ve bunun sonucu rotor dönmektedir. Bu prensibe dayanarak çalışan motorlar Endüksiyon motoru olarak tanınır.
Endüksiyon motorlarında rotor akımı endüksiyon sonucu oluşur.
Deney motorunun bu sefer de (u) ile (v) terminalleri arasına 10 Ω’luk bir direnç ve (v) ile (w) terminalleri arasına demir çekirdekli bir bobin (örneğin : 300 sargı) bağlanmıştır. Sonra, rotor sıkı tutularak statora anma geriliminin % 30’u kadar altında bir gerilim uygulanmıştır.
Rotora el ile ilk hareket verildikten sonra motor sargılarından bir dırıltı sesinin çıktığı ve rotorun dönme hızı arttıkça bu serin pesleștiği ; yani kalınlaştığı izlenecektir.
Deney motoruna gerilim uygulandığında rotor sargıları üzerinden bir alternatif akım geçmektedir. Rotor sükûnet durumunda iken, rotordan geçen akımın frekansı uygulanan gerilimin frekansına (örneğin : 50 Hz) eşittir. Rotorda ortaya çıkan akım Lenz kuralına göre kendisini oluşturan nedeni yok etmek isteyecek ve bu akım rotoru stator döner alanı yönünde çevirecek şekilde akacaktır. Rotorun dönme hızı arttıkça stator döner alanı manyetik akısının, rotor sargılarını tarama hızı gitgide azalacaktır. Bu azalma motorun sargılarından gelen seslerin pesleşmesiyle kendini belli etmektedir.
Endüksiyon motorlarında rotor devir sayısının artması rotorda endüklenen gerilimi ve bu gerilimin frekansını düşürür.
fL = f – (f – nL ) / ns
fL = rotor frekansı
f = stator frekansı
nL = rotor devir sayısı
ns = döner alan devir sayısı
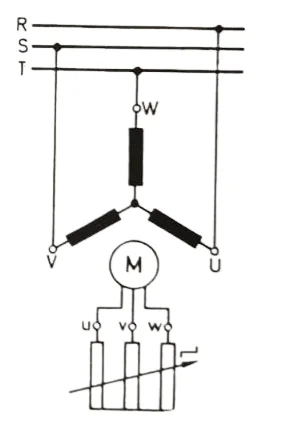
Rotor sükünet gerilimi büyük bir rotor akımı doğuracağı için, rotor sargıları kısa devre edilmiş döner bilezikli asenkron motorlarında büyük ölçüde devre bağlama akımları gerekir. Bu nedenle, rotor akım devresinin direnci bir Yol verici ile büyültülür. (Şekil – 457). Bunun sonucu devre bağlama akımı daha küçük olur ve motor hareketine daha yumuşak başlar. Ancak, endüklenen gerilim düştüğü için, devir sayısının artmasına paralel olarak yol verme dirençleri de küçültülür.
Rotordan geçen alternatif akımların birbirlerine göre faz farkları vardır; yani rotorda üç fazlı bir akım söz konusudur. Bu üç fazlı akım rotor üzerinde bir rotor döner alanı ortaya çıkarır. Rotor devir sayısının yükselmesi, rotor akımının frekansını aynı oranda düşürmektedir. Bunun sonucu, rotor döner alanı rotorun devir hızından etkilenmeksizin stator döner alanına göre olan durumunu korur. (Şekil-458). Bu nedenle asenkron motorlar «adım» yitirmezler. Asenkron motorunda rotorun devir sayısı, döner alanın devir sayısından daima biraz küçüktür. Aksi halde rotorda gerilimler endüklenmeyecek ve rotorun dönmesi söz konusu olamayacaktı.

Özet olarak : Asenkron motorunda stator sargılarından geçen akım, manyetik döner alan üretir. Bu döner alanın etkisi altında kalan rotor sargıları üzerinde alternatif gerilimler endüklenir. Rotor sargıları kısa devre edilmiş ise, bu sargılar üzerinden geçen akımlar rotor – döner alanını oluşturur. Rotor döner alanı ile stator döner alanının karşılıklı etkimesi sonucu rotor dönmeye başlar.
Kimi motorlarda stator içte, rotor dışta bulunur. Ancak dönen parça yine rotordur. Oto – frenlerinin kontrol edildiği sistemlerde, bazı yürüyen merdivenlerde ve özel aspiratörlerde kullanılan bu tür motorlar yukarıda anlatılan asenkron motor prensibine göre çalışır.
Rotordan beslemeli motorlarda, içte bulunan rotor döner bilezikler üzerinden akım şebekesine bağlanır. Buna karşın stator sargıları kısa devre edilmiştir. Doğrudan doğruya akım şebekesinden beslenen rotor üzerinde bir döner alan oluşur. Bu döner alan stator sargıları üzerinde endüksiyon nedeni ile bir akım ve bunun sonucu stator döner alanını ortaya çıkarır. Ancak bu kez rotor kendi döner alanının ters yönünde (Lenz kuralı) dönecektir.
“Bilezikli Asenkron Motor” üzerine bir yorum
Döner kısım asenkron motor